强大的硬件配置和丰富的功能模块,为智能桌面机器人提供全方位支持
正面配备2.2寸屏幕,用于显示状态、表情、图像、对话字幕。屏幕顶部显示"聆听中..."等机器人状态指示,包括聆听、说话、配网、时间等信息;左侧是WIFI信号强度指示;右侧为电量与充电状态指示;中间是表情显示,增添互动趣味;底部则是对话字幕显示,方便同步查看交流内容,助力交互体验。
屏幕上方有两个麦克风,可实现语音交互。设备预置唤醒词为:"小豆小豆"。 单击背后按键或者轻触头顶,可实现免唤醒词唤醒机器人进入聆听状态。支持语音打断和重新唤醒功能。
头顶摄像头,支持图像识别与视觉交互。可进行拍照、人脸识别等视觉功能,为用户提供更丰富的交互体验。
两侧设有灯环,能通过灯光变化呈现不同状态。待机状态:两侧灯环熄灭;聆听状态:两侧灯环为红色;说话状态:两侧灯环为绿色。直观展示机器人运行状态。
双腿结构可进行简单的动作展示,支持行走(前进、后退)、转身(左转、右转)、左右摇摆、太空步、上下运动等丰富动作。可通过组织语言控制方向、步数、行走速度、摇摆次数、摇摆速度、摇摆幅度、太空步次数、太空步方向、上下运动次数、运动速度、运动幅度等参数。
支持WiFi配网,轻松接入千机阁智能体平台。在无记忆WiFi环境下开机,等待1-2分钟左右自动进入配网模式;或在屏幕显示"扫描 Wi-Fi"或"连接 xxxx.."时,快速单击机器人背后按键,即可手动进入配网模式。
豆赋脑机器人完整技术参数,涵盖整机信息、结构与运动、核心硬件、屏幕显示、感知与安全、灯效系统、语音交互系统等七大类详细配置
| 分类 | 详细规格 |
|---|---|
| 整机信息 |
产品外观:100.8MM×72MM×113.5MM 电池规格:7.4V 35C高倍率放电系数锂电池(2S) 电池保护:电池保护 IC,过充/过放/过流/短路保护 输入电压:TypeC 5V 输入 低功耗特性:支持低功耗模式,可控电源域,支持深度休眠 开关机方式:按键长按3S开机、长按3S关机 |
| 结构与运动 |
舵机:数码金属齿舵机:4个 运动结构:双足四舵机独立驱动 内置动作组:前进、后退、左转、右转、跳舞、踮脚等动作 舵机供电:独立DCDC 5V供电,最大连续输出5A电流 遥控与校准:支持通过WIFI手动控制运动以及舵机角度校准 |
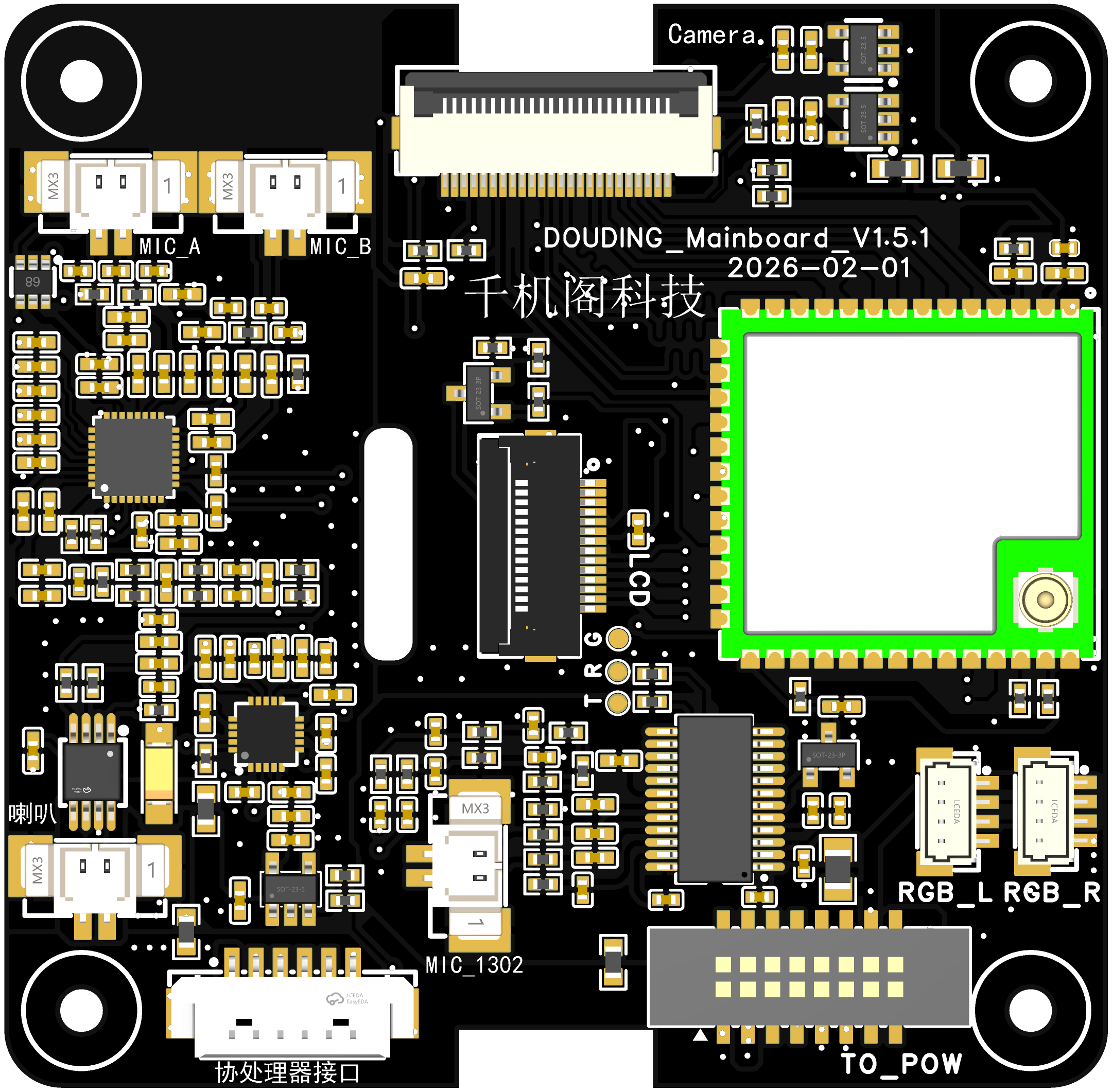
| 核心硬件 |
主处理器:ESP32-S3 协处理器:STM32 摄像头:OV2640,DCMI 接口,200 万像素,支持硬件JPEG压缩 传感器:6 轴超低功耗IMU、两路TOF悬崖检测、一路触摸感应 主协处理器通信方式:UART 通信方式:2.4 GHz WIFI:支持 / Bluetooth 5 (LE):支持 / Bluetooth Mesh:支持 |
| 屏幕显示 |
显示单元:2.2 寸 TFT 高清彩屏,分辨率 240×320 显示内容:动态表情、系统状态、开/关机动画、信号强弱、对话文字内容 控制方式:SPI 接口驱动 表情系统:内置丰富表情图片,可随交互动态切换 |
| 感知与安全 | 安全功能:桌面边缘实时检测,主动防跌落 |
| 灯效系统 |
灯环配置:双侧 RGB 智能灯环 控制方式:WS2812 可编程 RGB 灯效场景:开机、唤醒、配网等场景 |
| 语音交互系统 |
麦克风配置:双硅麦阵列、支持声源定位 音频 ADC:ES7210 四通道音频 ADC 音频编解码:ES8311 低功耗 Codec 功放:3W 单声道 D 类功放 音频处理:AEC 回声消除、降噪、远场拾音 离线语音唤醒:支持,无需联网即可唤醒 流式语音对话:支持 WebSocket / UDP 协议的实时对话 多语言识别:支持国语、粤语、英语、日语、韩语五种语言(SenseVoice) 声纹识别:支持 3D Speaker,可区分说话人 语音合成 TTS:火山引擎 / CosyVoice 大模型 TTS 大模型支持:通义千问、DeepSeek、豆包等 LLM 个性化:自定义提示词、音色、角色 记忆功能:具备短期记忆,对话自动总结 MCP 服务:支持 |
搭载系统化、多层次智能功耗管控方案,可根据设备运行状态、剩余电量动态调配能耗,兼顾使用续航与运行稳定性
实时监测电池剩余电量,当电量低于预设阈值时,通过弹窗提示主动发出低电量告警,及时提醒用户补充充电,避免突发断电导致数据异常、任务中断。
设备闲置过程中可自动切入低功耗运行状态,下调主控运行频率、关闭闲置外设、降低屏幕功耗、优化传感器采样频次,在不直接关机的前提下缩减待机耗电,延长整机待机续航。
当设备长时间未接收语音、触控等任何交互指令,达到设定超时时间后,系统执行有序自动关机,避免无人值守状态下持续空耗电量。
全方位展示智能体开发套件的各个细节,帮助您全面了解产品的外观和功能(点击图片可放大查看)
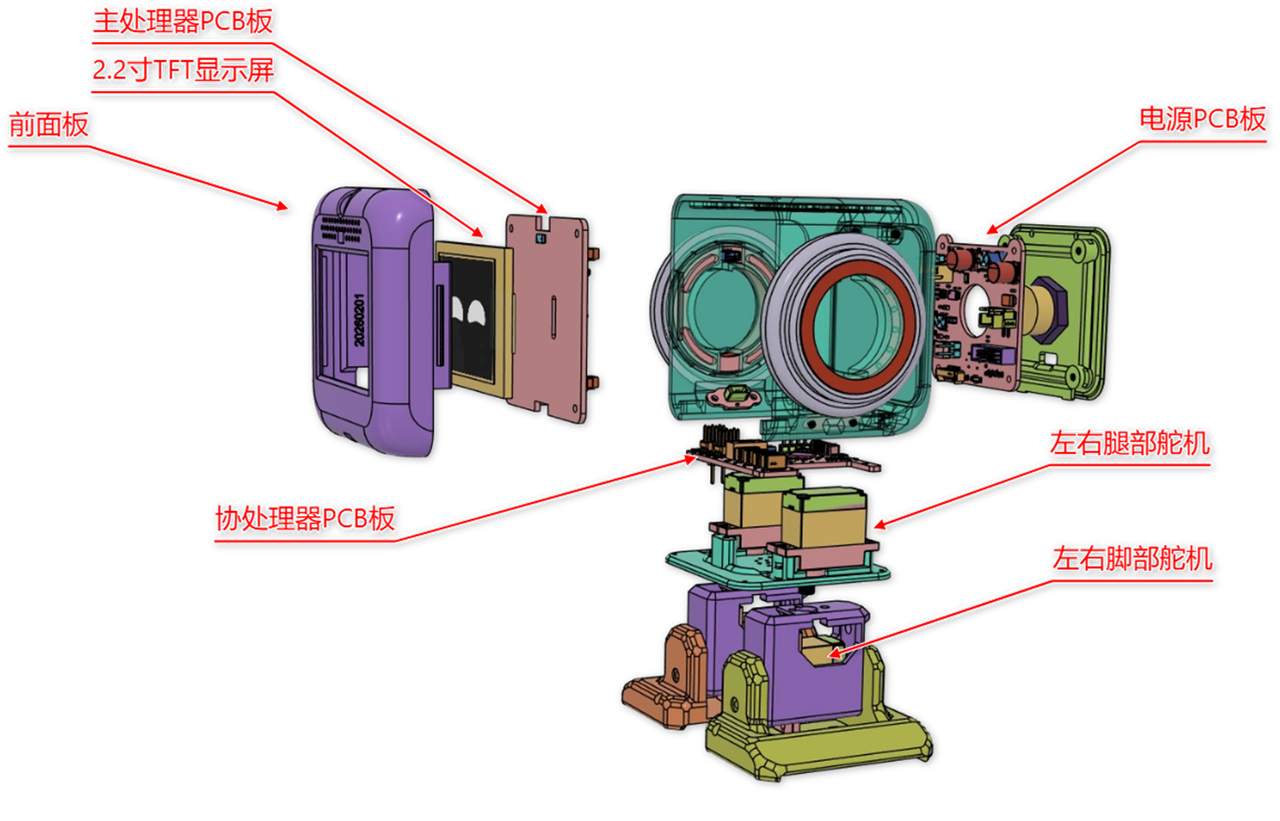
展示豆赋脑机器人的结构,包括2.2寸高清屏幕、双麦克风阵列、RGB智能灯环等核心组件的布局设计。
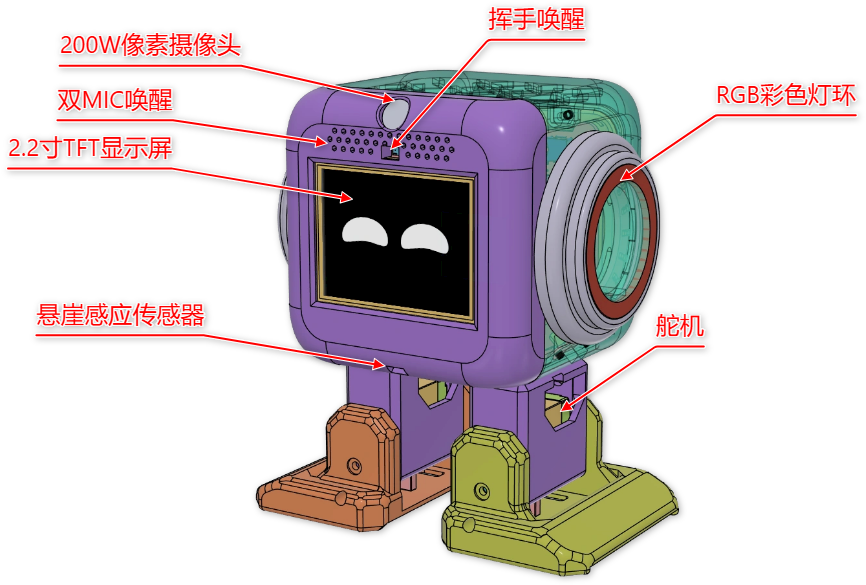
展示豆赋脑机器人的正面结构,呈现双足四舵机的仿生设计,以及整体机身线条的流畅性和科技感。
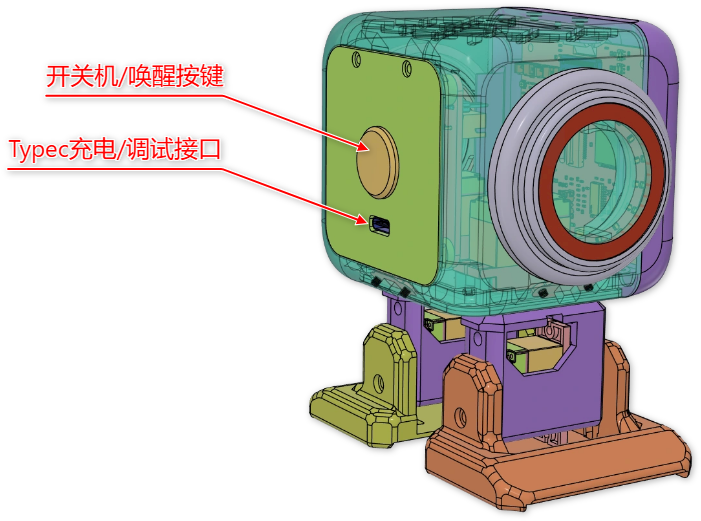
展示豆赋脑机器人的背面设计,包括Type-C充电接口、功能按键以及整体结构的紧凑性和实用性。

采用四数码金属齿舵机驱动双足结构,180° 精准控制,回中稳、无抖动;6V 下输出 2.2kg.cm
强劲扭矩,支撑有力、行走稳定。
铜质金属齿轮搭配铁芯马达,耐磨抗造、寿命更长;
12.7g 微型轻量化设计,机身更轻盈、步态更自然。

正面搭载2.2 寸 TFT 高清彩屏,240×320 分辨率,色彩细腻、显示清晰。支持动态表情、系统状态、交互信息实时展示,配合 RGB 灯环同步变色,让机器人拥有丰富 “情绪” 与 “表情”。

搭载OV2640 200 万像素高清摄像头,支持自动曝光、白平衡、降噪,体积小、功耗低。可实现视觉识别、图像采集、动作跟随,为视觉交互与 AI 开发提供强大视觉输入。
ESP32‑S3 统筹 AI 运算、语音、视觉与人机交互逻辑,设备运行稳定安全,兼容千机赋能平台,便于二次开发,可实现离线语音唤醒、多语种识别、视觉交互、动态动作控制;搭载双麦阵列与专业音频处理电路,支持远距离拾音,依托大模型实现灵敏语音问答、指令控制、场景理解与自然对话。
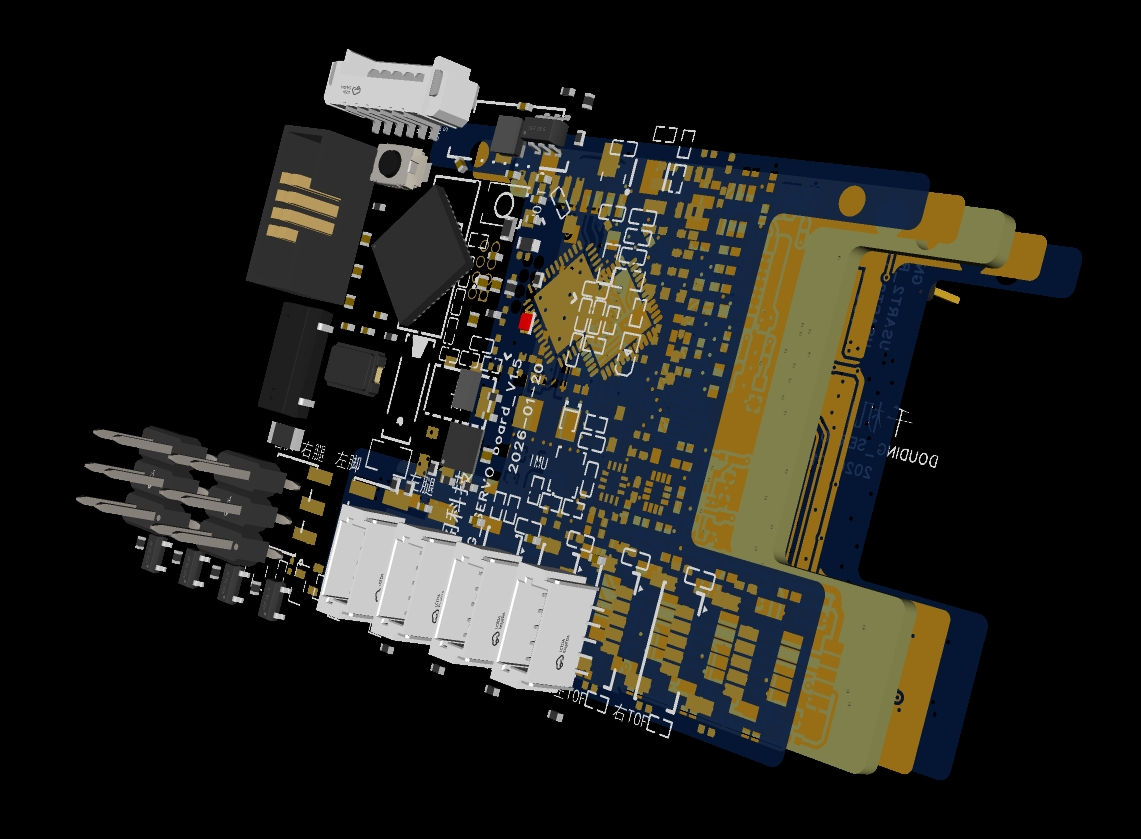
协处理控制板搭载 STM32 芯片,独立管控舵机与外接传感器,分担主控算力负载,提升动作流畅度与响应速度。电路带电平隔离设计,可稳定驱动四路舵机,实现双足精准行走与姿态调控;支持多路防跌落传感器,可实时检测落差并自主躲避;同时支持IMU 姿态采集,有效提升机器人动作精度、交互响应速度与运行安全性。
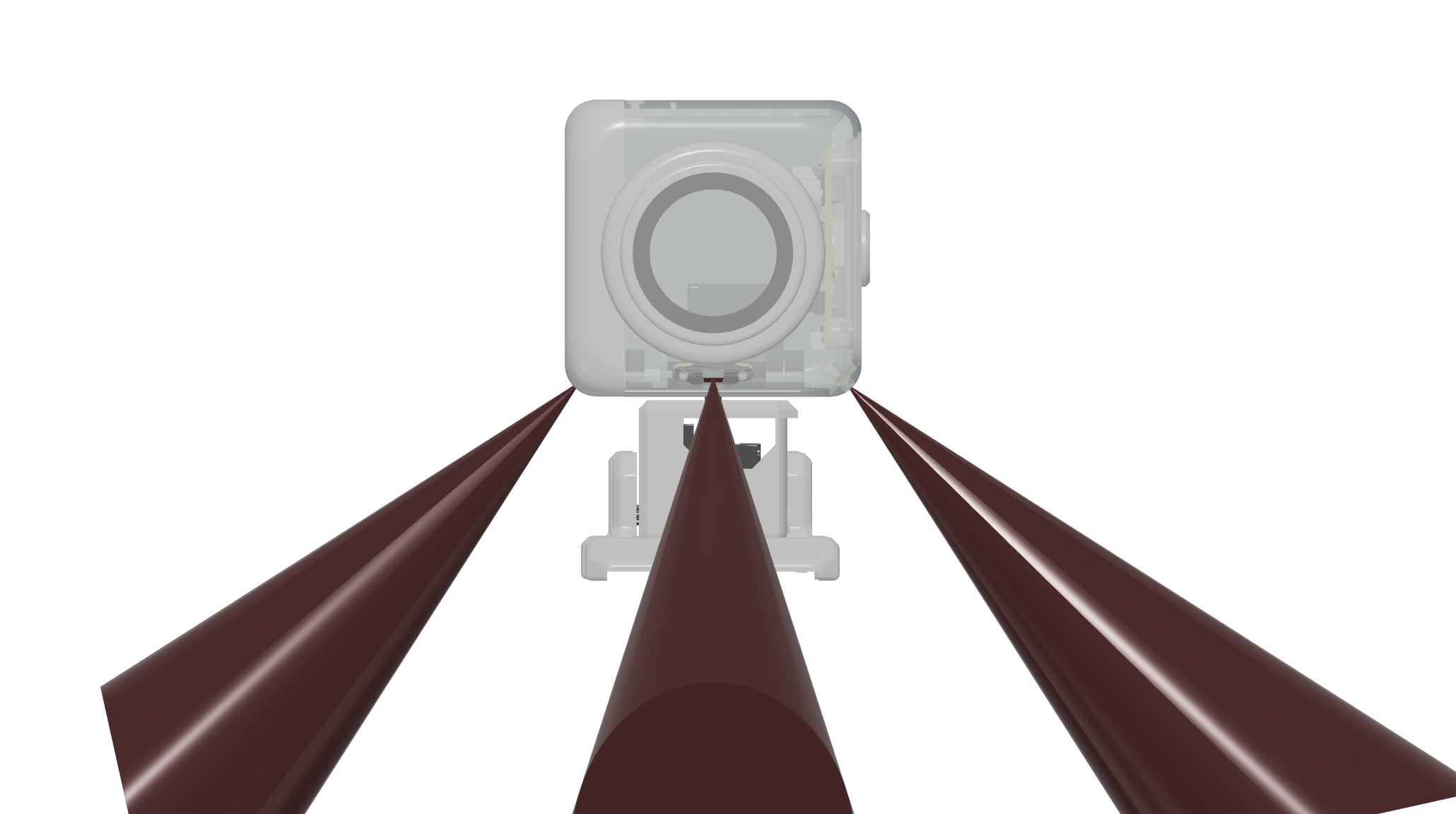
机器人在机身前后方向部署了高精度 TOF 测距传感器,通过实时测距实现悬崖感知。当机器人靠近桌面边缘时,系统可快速识别跌落风险并主动调整步态,有效避免意外掉落,为桌面交互与行走演示提供可靠安全保障。
智能体开发套件支持丰富的应用场景,涵盖语音交互、物联网、机器视觉、教学科研等多个领域
设备配网助手是适配桌面智能机器人的配套调试管理工具,集成设备联网配置、舵机参数校准、设备重启三大核心功能,操作简洁直观,方便用户快速完成设备初始化与日常调试维护

支持通过 WiFi 模式为机器人完成网络配置,只需简单几步操作即可录入无线网络名称与密码,快速建立设备与局域网连接,让机器人接入网络实现云端交互、远程控制、在线数据交互等智能功能。
支持网页端可视化手动调试,用户可在线精准调节各个舵机初始零点位置,灵活修正姿态偏移、装配公差带来的角度偏差,精细化校准肢体等动作基准姿态,保证机器人动作规整、运行姿态精准,适配不同装配工况下的调试需求。
在完成 WiFi 配网修改、舵机参数校准设置后,点击该按钮可远程下发重启指令,设备重启后新配置参数自动加载生效;相较于长按实体按键 3 秒开关机的操作方式,网页一键重启操作更便捷高效,省去手动按压机身按键的繁琐步骤,大幅提升调试、改参效率。
使用豆赋脑机器人时请注意以下事项,以确保最佳使用体验和设备安全
需根据coze接口需求文档,千机阁平台——coze接口需求文档,提供扣子的机器人id和个人访问令牌,默认配置为测试例程,需根据实际使用情况进行更换。智能体管理中的语音识别以及语音合成为试用api,调用资源有限,如需正式使用请自行购买。
电量过低时屏幕会弹窗警告,请及时充电,防止电池损坏。
避免强光直射、高温等复杂环境,3D打印材质需妥善保护。
严禁按压屏幕面板,避免损坏显示组件。
如动作不停,可在聆听状态说"停止动作"。
同一设备不可注册在多个智能体下,切换需先解绑再绑定。
请在安静环境使用,网络不佳或智能体速度慢会导致回话卡顿。
